
Vladimir is a product manager with an engineering background and deep expertise in stream processing and real-time data pipelines. Ten years of building internal software platforms and development infrastructure have made him passionate about new technologies and finding ways to simplify data processing. Vladimir co-authored two white papers on the topic: Understanding Stream Processing: Fast Processing of Infinite and Big Data, and A Reference Guide to Stream Processing. His tutorial video on stream processing and real-time data pipelines discusses the building blocks of a stream processing pipeline and demonstrates how developers can write a full-blown streaming pipeline in less than a hundred lines of Java code for a variety of applications. Vladimir is also a lecturer with the Czechitas Foundation, whose mission is to inspire women and girls to explore the world of information technology. Czechitas Foundation teaches coding in various programming languages, software testing, and data analysis.
View all blogs by the authorMay 14, 2020
How Hazelcast Jet Compares to Apache Spark
“How Jet compares to Spark” and “why should I choose Jet over Spark” are arguably the most frequent questions I’ve been asked during the talks and workshops. While it is hard to assess the product fit without focusing on a concrete use-case, I’d still like to compare concepts and architecture used under the hood of both frameworks.
Versions considered: Hazelcast Jet 4.1 and Apache Spark 2.4.5.
Computations Modeled as Graphs
Apache Spark and Hazelcast Jet (referred to as “frameworks”) are both tools for clustered computing. They are applicable mostly for analytical (OLAP) applications, including those that apply a series of processing steps to many uniform data records (such as lines in a file, rows in a table or records appended to a stream), as one example.
Both frameworks build the on principles of dataflow programming: a user builds an application by chaining high-level coarse-grained operators such as map, join or aggregate. The operators form a network that can be modeled as a graph (directed acyclic graphs or DAG to be specific) where nodes represent steps in the computation and edges represent data exchange.
The dataflow model has some important properties that both frameworks use for scaling and fault-tolerance:
- Pipeline Parallelism: operators can work independently, in parallel.
- Data Parallelism: a single operator can run in multiple instances, each instance processing a particular data partition
- No Shared State: each operator instance manages its state exclusively. There is no shared state to coordinate access to or to replicate. Moreover, the state is only determined by the input data. As a result, the operator can be recovered by replaying the input data.
Spark and Jet differ in how they use and execute the DAG as explained in the next section but fundamentally: no matter which API you use (RDDs, Spark SQL or a Pipeline API of Jet), the physical execution plan is a DAG representing the dataflow.
Staged x Continuous Execution Mode
In Spark, the DAG nodes represent execution stages. A stage must be fully completed before Spark starts the next one. In Jet, DAG represents connected operators. Jet executes all DAG nodes concurrently.
Let’s use a textbook OLAP example to elaborate: the log analysis (a real-world application of notorious word count). Data from the access logs are aggregated over different grouping keys, such as counting the web sessions over several web applications using shared session id.
This is the Spark and Jet code to load the data, pre-process (parse) and aggregate it:
Spark RDD API (Java)
sc.textFile("/path/to/input/") .flatMap(LineIterator::new) .mapToPair(s -> new Tuple2<>(s, 1L)) .reduceByKey((Function2<Long, Long, Long>) (a, b) -> a + b) .saveAsTextFile("/path/to/output/");
Jet Pipeline API (Java)
p.readFrom(Sources.files("/path/to/input/")) .map(LogLine::parse) .groupingKey(wholeItem()) .aggregate(counting()) .writeTo(Sinks.files("/path/to/output/"));
Spark and Staged Execution
Spark splits the computation to non-overlapping stages. A reading stage and a group-and-aggregate stage, in our case. During the reading stage, Spark workers fetch data from disk files, parse it and cache it in the cluster memory. Spark schedules more tasks if the source can be read in parallel (e.g. data is partitioned). All reading stage tasks must be finished before the first aggregating task is started.
This is the DAG representing execution stages (source: https://www.tutorialkart.com/apache-spark/dag-and-physical-execution-plan/).
Staged execution was designed to support an iterative analytics use-case where the results of one stage stay cached in a cluster memory to be reused by a following step in the analysis. This makes Spark a popular choice for ML research where a data scientist gradually evolves the dataset with new experiments, evicting the data when their Spark session is over. It is also a powerful debugging tool.
On the other hand, staged execution doesn’t perform well for latency-sensitive use-cases, namely stream processing.
Streaming data is continuously incrementing. Staged execution is however designed for finite datasets. Whole input must be read before Spark starts subsequent steps. Spark Streaming works around this by batching the input data, e.g. creating finite chunks from an infinite stream. Buffering adds to the job latency as the data are waiting for the batch to fill, staying idle.
The stages are planned and scheduled again and again for every batch. The overhead of the planning process increases the latency further.
Another latency penalty comes if the data partitions are not balanced evenly. If a single partition of data takes longer to read or process, it would block the whole job from progressing since the next stage can’t be started. Jet would be impacted by this scenario, too, but it can still provide early results – in-complete, indicative results based on already processed partitions.
Jet and Continuous Execution
Jet executes all DAG nodes concurrently. The DAG is deployed to all cluster nodes when the job is submitted and runs until a termination. The instances of running DAG nodes, called Processors, then run in parallel and continuously exchange data. For partitioned data sets, the data partitions are evenly distributed among available processors (see the docs).
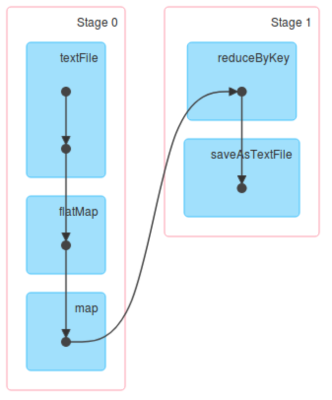
This is the DAG representing the execution plan for the log aggregation. Jet would create multiple instances of each and route data among it following the routing strategy (source: https://jet-start.sh/docs/next/architecture/distributed-computing):

A reading Processor keeps fetching data from the data source and sends it to a downstream channel immediately. The channel routes data to the respective aggregating processor, following the grouping key. The aggregating processor is observing the input channel and updates the aggregate with each input item. It’s an application concern to specify when the aggregator emits the aggregate downstream – with every input item, after a period of time, after the whole dataset has been processed or based on a data-driven trigger.
The continuous execution model is a natural fit for streaming use-cases that stress low latency. Jet Jobs can keep millisecond latencies on a large scale.
Spark has introduced the continuous execution mode in 2.4. The mode is still experimental and is limited to stateless operators (mapping, filtering) so it wasn’t considered for this comparison.
In-Memory Execution
Spark and Jet both rely on an in-memory execution. That means that data transfer and execution state both use the cluster RAM.
Data Transfer
In-memory data transfer means that the data between the consecutive DAG nodes are exchanged using shared memory instead of a disk (shuffling the data among cluster nodes still requires a network, of course).
Spark exchanges data between stages by saving the complete output of an upstream stage in the memory of the worker to be used as an input of a downstream stage. Jet uses in-memory queues to connect upstream and downstream Processors.
That makes Spark more memory demanding as it caches the whole dataset exchanged between two steps which can easily be hundreds of GB of data. Spark workers are therefore able to spill data to disk not to run out of memory. Jet processors run all in parallel and exchange data continuously. The in-flight data are no more than a few thousand records.
Execution State
Execution state refers to the temporary data of the computation, such as the value of an ongoing aggregation or join. Both Jet and Spark keep the state data on heap by default.
Spark can however also place execution state off-heap and even spill it to disk. It can, therefore, perform calculations that require a large state such as joins or sorts on huge datasets. For Jet, the execution state must fit to cluster memory.
Dedicated x Shared Resources
Spark applications running in a cluster are isolated from each other. Jet shares the cluster resources between applications (called Jobs). No approach is “the right one”. It’s trading-off isolation and performance.
Spark Assigns Dedicated Resources
For each application, Spark runs dedicated processes for both scheduling and execution.
The processes are created with the resources (CPU, memory and disk) allocated to the application upon startup and reserved during job lifetime. After the Spark Application ends, the processes are terminated and the resources are freed.
This design clearly favours isolation. A noisy application doesn’t affect the neighbours using the same computer. It can, however, lead to overprovisioning as an Application holds allocated resources even if it doesn’t require it.
Spark was designed in the age of Hadoop – huge clusters of heterogeneous machines running many workloads. Multi-tenancy was, therefore, a first-level design concern.
Jet Shares Resources
The Jet cluster is also formed by multiple member processes. Those processes are started when the cluster starts and aren’t coupled with a lifecycle of individual hosted Job.
Jobs share the cluster resources and run in a cooperative mode. Each job does a small amount of work and yields to the next one. Job is removed from this round-robin after it finishes.
This design leads to efficient resource utilization. All jobs get a fair amount of CPU time. If a job gets idle (e.g. waiting for more input data), it simply backs off and Jet excludes it from the round-robin rotation for a few milliseconds, giving busy Jobs more CPU to keep up.
Resource sharing is of course prone to noisy neighbours – a greedy job can starve others. To prevent this, Jet recommends starting a cluster per tenant or even per job, increasing the isolation to a Spark level.
Shared Datasets
Another benefit of job sharing processes is exchanging data over the shared memory.
A job can load and pre-process data, caching it in cluster memory (Jet comes with distributed storage). The cached collection then becomes a source for further processing jobs, leading to significant performance gains from reading the local memory instead of a remote data source. Another use-case is shared reference data (such as lookup tables or parameters) or queues connecting the output stream of one job to an input of another one.
Spark applications run in isolated processes so they must use external storage to exchange data.
Conclusion
Jet and Spark are frameworks that use principles of dataflow programming to run analytical computations on clusters of machines for scalability and resiliency.
They differ in how they implement and execute the data flow. Jet’s design favours streaming use-cases that benefit from the low-latency continuous execution. Spark can spill data to disk and isolates jobs on a process level. Therefore it’s a good fit for large, multi-tenant clusters.
Other areas worth comparing are the cluster architecture and APIs. They will be covered in the next part of the article.